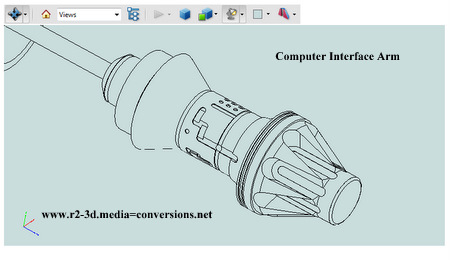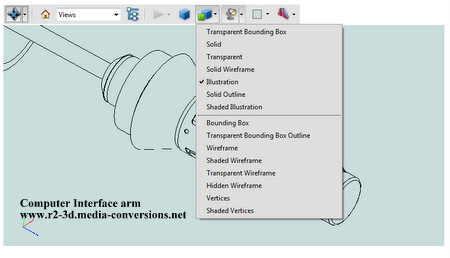
Once you open the 3D .pdf file, you can change the display to "illustration" (bottom left) by using the dropdown list from the top of the screen (bottom right). It makes it easier to see the detail on the front of the interface arm.
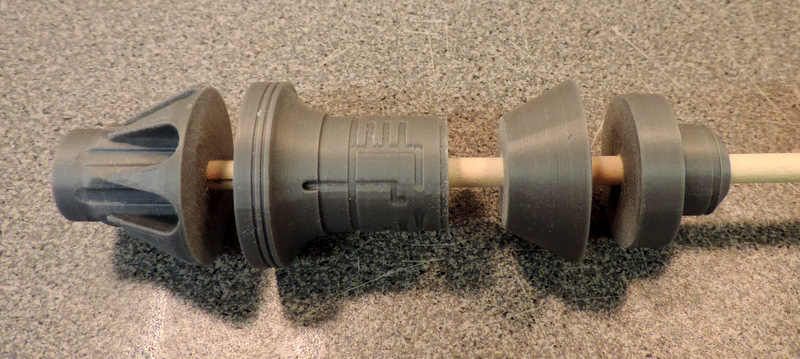
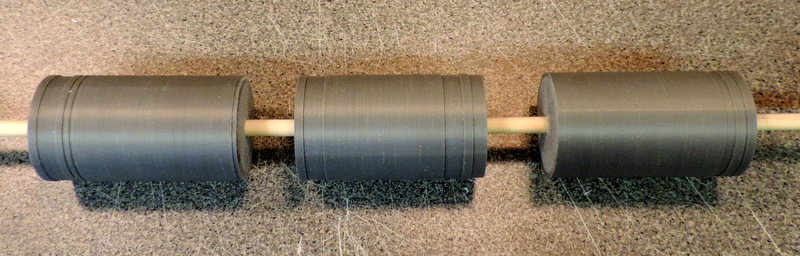
I only have 2 pictures of the arm that I managed to find in the R2BC Galleries under Reference Photos / Tools, Gadets & Accessories. One thing that the drawing files do not show is the alignment of the detail "carving" around the center of the front part with respect to the 8 grooves on the probe tip. If anyone has, or can point me at, a photo of the arm tip that shows the alignment of, for example, the set screw hole, with one of the grooves in the tip, I'd appreaciate it.
You can download models in STEP AP203 (.stp) format in English (inch) units as well as in 3D.pdf format: click here.